0755-23323753
0755-23323753
0755-23323753
0755-23323753

电话:0755-23323753
总部:14704701606
华东:18114637169
邮箱:sales@cldkey.com
地址:深圳市宝安西乡街道办107国道375号金山科创园1栋8楼802
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定(或摄像机标定)。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。因此,做好相机标定是做好后续工作的前提,提高标定精度是科研工作的重点所在。
相机标定方法有:传统相机标定法、主动视觉相机标定方法、相机自标定法。
世界坐标系是系统的坐标系,在没有建立用户坐标系之前画面上所有点的坐标都是以该坐标系的原点来确定各自的位置的。
一般也定义到台相机的相机坐标系上。原点位于相机光心处。那么,这台相机的投影矩阵P=[ I|0]。也就是,这台相机在世界坐标系中没有进行平移和旋转。这样其他相机的位置就可以以台相机定义出来的世界坐标系为参考进行旋转和平移了。这样做的目的是为了计算起来简单。当然也可以不用这样构建世界坐标系。但是计算出来会复杂些。
机器视觉就是用机器代替人眼来做测量和判断。
机器视觉系统是指通过机器视觉产品将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
摄像头分为CCD、和CMOS两种。
计算机视觉领域中常见的四个坐标系:像素坐标系、图像坐标系,相机坐标系,世界坐标系。
1. 像素坐标系:
如下图所示:像素坐标系u-v的原点为O0,
横坐标u和纵坐标v分别是图像所在的行和列,
在视觉处理库OpenCV中,u对应x,v对应y;
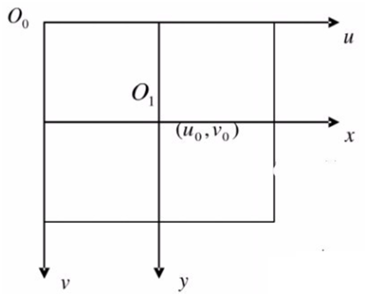
2. 图像坐标系:
图像坐标系x-y的原点是O1,为像素坐标系的中点,
如图所示:
假设(u0,v0)代表O1在u-v坐标系下的坐标,dx和dy分别表示每个像素在横轴x和纵轴y的物理尺寸;
则图像坐标系和像素坐标系的关系如下:


3. 假设物理坐标系中的单位为毫米,那么dx的单位为毫米/像素。
那么x/dx的单位就是像素了,
即和u的单位一样。
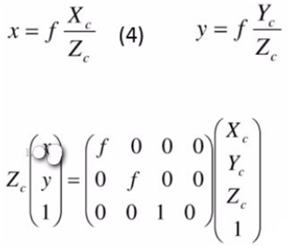
为了方便,
将上式写成矩阵形式:

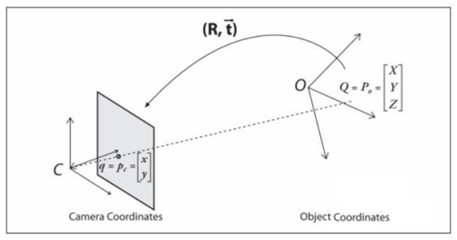
4. 相机坐标系:
如图所示:
O为摄像机光心,
Zc为摄像机的光轴,和图像平面垂直;
OO1为摄像机焦距;

5. 相机坐标系与图像坐标系的关系:
如图所示:
6. 世界坐标系:
世界坐标系是为了描述相机的位置而被引入的,
任何维的旋转可以表示为坐标向量与合适的方阵的乘积。
平移向量是个坐标原点与第二个坐标原点的偏移量;
在世界坐标系下,有两个重要的参数:
旋转矩阵R和平移向量T